








 发表于 2021-11-22 14:29
发表于 2021-11-22 14:29
介绍
在本章中,我们将介绍另一种与布局的视觉属性有关的表示,即布局中每对点之间的相互可见性,以及如何将其构建到构建环境的视觉配置中。这种更细粒度的表示对于从特定位置解决与空间认知相关的问题尤为重要。理解建筑环境的视觉感知可能有助于预测无障碍空间如何提供移动。这种静态表示为将在最后一章介绍的动态代理模型奠定了基础。
lsovist和 VGA分析
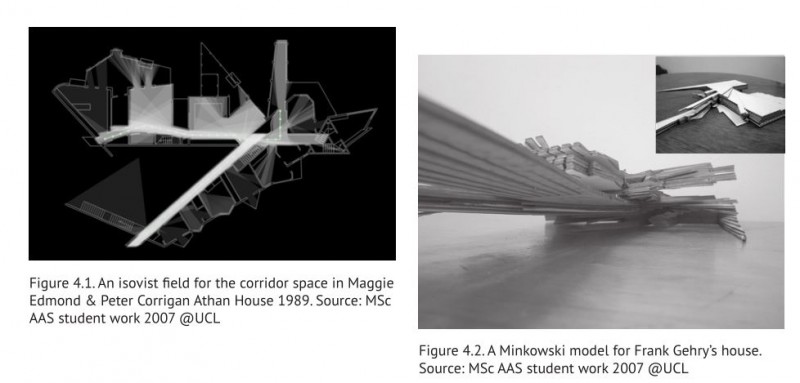
由Benedikt(1979)首次提出的isovists,也就是视域范围,是指空间环境中从某一点直接可见的区域(见图4.1)。isovist是一个被封闭多边形束缚的物理物体;因此它具有几何性质,如面积和周长。可见场的空间属性可以归因于该点,并可以构建一个连接该点与其他点的图。lsovists 也可以从一个区域(如凸空间)构建,以显示从该区域可见的场。此外,isovists可以从 facade构造,照亮从facade表面可见的部分环境。一组isovists也可以从一个定期的路径构建,以显示用户如何通过布局从起点(即入口)到特定的目的地(即最深的凸空间)的空间体验。覆盖这条路径的整体分子集合通常被称为闵可夫斯基模型(见图4.2)。
为了再现类似于 Hillier 和 Hanson(1984)的表示,Turner等人(2001)构建了一个连接人类尺度网格中所有可见点的无向图。这种表示的乘积是一个可见性图,其中每个点都被标记为一个节点,而相互可见性是将一个节点连接到另一个节点的条件。在 Depthmap×中,可以使用不同的局部和全局度量来计算系统中不同节点之间的可视化关系。该方案通过使用连接工具,实现了对不同楼层空间布局的可视化图形分析。
可见性图表措施
在本节中,我们将解释三种主要的可见性图拓扑度量,用于解释布局的空间配置的高分辨率图像。这些措施取决于周边地区的规模。我们将在这里解释聚类系数的局部度量、整合度的全局度量和控件的局部度量。
聚类系数由每个节点的本地配置导出,并计算从一个位置可见的节点本身是相互可见的程度。聚类系数指示了当一个人从一个位置移动到另一个位置时,在视觉信息方面损失了多少。更接近于凸空间的 isovists保持高聚类系数,因此当从这些位置移动时很少丢失视觉信息。与凸同性相反,尖同性对应的聚类系数较低;因此,当离开这些位置时,更多的视觉信息会丢失。理解这些属性对于阐明导航和寻路类型之间的关系以及系统中视觉信息的变化是至关重要的。例如,相关系数低的空间往往对应于行人决定方向的位置。聚类系数可能代表布局的凸性,通过阐明如何“自包含”的视觉信息在一个独立的领域。该方法还暴露了某些对象对布局视觉感知的干扰程度。
整合度被视为一种全局图度量,计算图中所有节点的平均最短路径长度。图中的最短路径是指从一个节点到达另一个节点所需要经过的最少的链接或步骤。一个节点的平均最短路径长度是这个节点到所有其他节点的所有最短路径长度的平均值。这里没有考虑标准化的真实相对不对称,因为这种度量仅用于比较空间环境中的位置。
控件计算当前邻近区域相对于直接邻近区域的总面积的面积。控件对于高光区域是有用的,观察者可以有一个大的空间布局视图。
 收藏
收藏  支持
支持  反对
反对  回复
回复 呼我
呼我